# Hardware Challenge
Now take your knowledge further. In the virtual challenges each team had the same environmental constraints to contend with. In the hardware challenge, not only will there be more variables to account for in the environment but variation between robots.
Your goal is to provide a solution to the analogous class challenge in the lab for the real robot, optimized for time.
Updates:
- Distances have been modified to fit the wall divider size provided in the lab.
- The requirement of following the tapeline has been lifted for challenge day.
# Scoring
As soon as the cart touches a wall or a cone, the trial is stopped.
- 5/10 follow the wall for 1 meter
- 6/10 follow the wall for 2 meters
- 7/10 follow the wall up to the gap
- 8/10 follow the wall + turn 1 around the far cone (no obstacles touched)
- 9/10 follow the wall + turn 1 + turn 2 passing the cone nearest the start (no obstacles touched)
- 9.5/10 all of the above + reaching the starting position
- 10/10 all of the above + reaching the starting position in less than 45 seconds.
- +0.5 fastest time
# Previous Instructions:
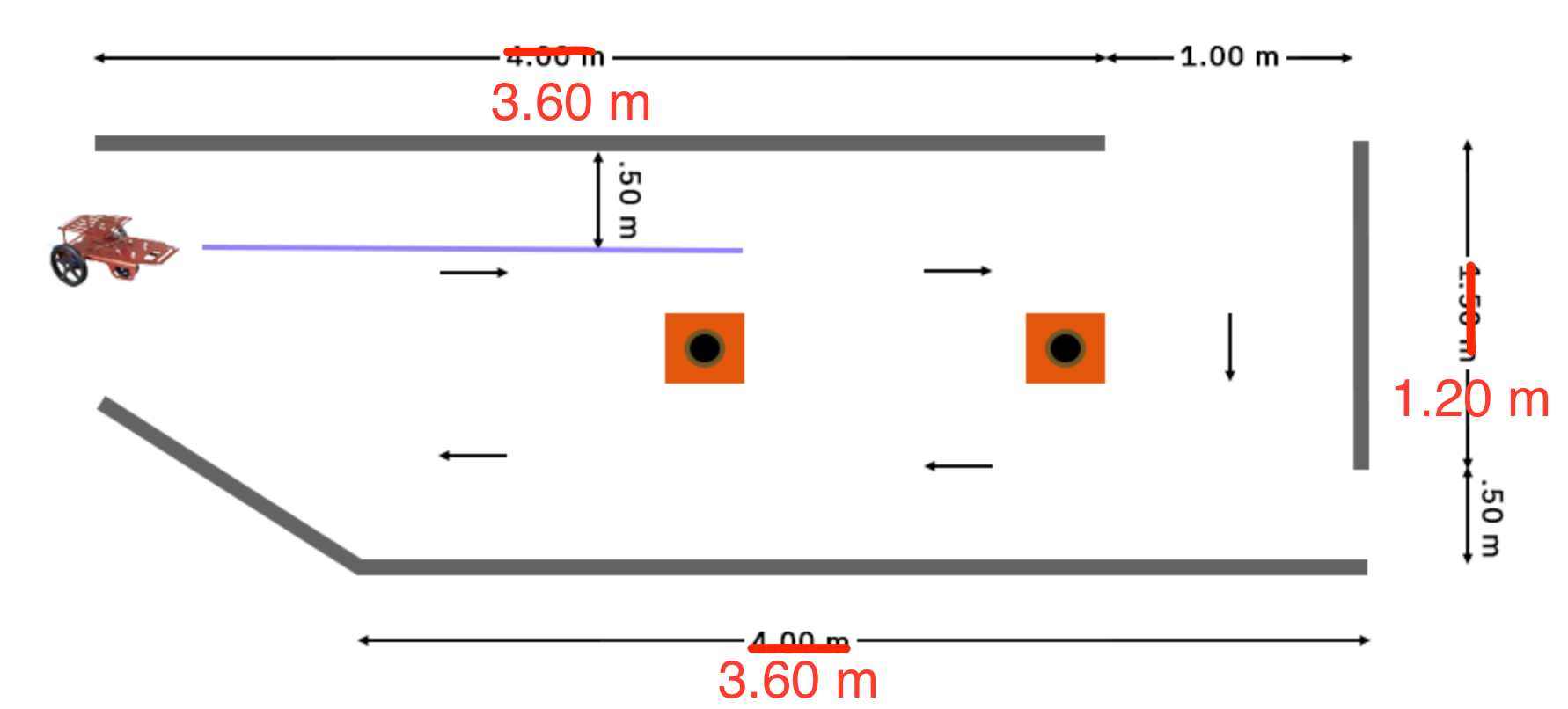
The hardware challenge constraints are changed slightly. Keep the robot wheels from touching a tape line at a distance of 50 cm from the wall for a 2.0 m segment of the course, then navigate around the cones finishing from where you started in the fastest possible time. The robot is not permitted to touch either the cones or the walls.
The starting position will be at approximately 60 cm from the wall at robot center. You will have 50 cm to orient yourself with respect to the tapeline from your starting position. Employ similar strategies from the virtual challenges and "Follow the Wall" to the hardware challenge!
# Instructions
- Test your virtual solution on the physical robot.
- Modify your code to complete the challenge, noting your modifications to report later.
- By the end of the lab period, try to have optimized for straight line motion.
- Coordinate with your team workflow for optimizing your solutions to prepare for the full hardware class challenge.